Le
GPWS et le MSAW
La
collision avec le sol ou l'eau d'un avion piloté est une des causes majeures de
pertes de vies humaines en aviation de transport. On appelle ici vol piloté
tout vol au cours duquel l'équipage n'a pas perdu le contrôle de l'avion, qui
reste techniquement et aérodynamiquement pilotable. La probabilité de survie
à un tel accident est très faible, du fait de la grande énergie cinétique et
de la concentration de l'impact.
A la fin des années
1960, un grand nombre d'avions de transport ont été équipés de radioaltimètres
nécessaires aux approches de précision. Le radioaltimètre est un équipement
embarqué autonome qui mesure la hauteur de l'avion par rapport au sol. Ce
capteur (radioaltimètre) permettait la liaison avec un calculateur d'alarme,
qui à partir des informations radioaltimétriques de l'instant (hauteur
instantanée du relief survolé) fournirait grâce à des enveloppes, une
"prédiction" sur la future hauteur au-dessus du relief. Le concept du
GPWS (Ground Proximity Warning Control) ou APS (Avertisseur de Proximité du
Sol) a été lancé 1969, et développé par bon nombre d'équipementiers dont
Sundstrand qui développa le GPWS ce qui lui permit d'acquérir un monopole.
En 1975, après
l'accident d'un Boeing B727 à Washington, la flotte américaine entière a été
équipée de GPWS. Selon des études américaines, une diminution du nombre
d'accidents classifiés "vols pilotés contre le relief" pourrait être
en partie attribuée au GPWS qui présentait pourtant des défauts initiaux.
Durant les cinq années précédant 1975, les États Unis ont connu une moyenne de
2,8 accidents de ce type par an. Après l’équipement de ce système dans la
flotte américaine, le nombre d’accidents a très fortement diminué. Ces résultats
de sécurité ont conduit en 1979 à inclure dans les normes l'emport d'un
dispositif avertisseur de proximité de sol. : Il "devra pouvoir donner
automatiquement en temps opportun à l'équipage de conduite un avertissement
clair lorsque l'avion se trouve dans une situation qui peut être dangereuse du
fait de la proximité de la surface terrestre". Selon une étude de l'équipementier
Sundstrand, environ 95 % de la flotte mondiale répondant à ces critères
d'emport était équipée en GPWS.
De janvier 1983 à
avril 1991, le système confidentiel de collecte de rapports d'incidents ASRS
(USA) a dénombré 64 rapports d'équipages ayant vécu une alerte GPWS. Dans au
moins 35 cas, c'est l'alerte GPWS qui a permis d'éviter l'accident.
Des études en vol auraient montré, un temps moyen de réaction salvatrice des équipages de 5 à 6 secondes après le déclenchement de l'alarme pour des pilotes non entraînés sous simulateur à l'utilisation du GPWS.
Le
GPWS est un équipement qui déclenche une alarme vocale et visuelle lorsque,
entre 30 et 2450 ft, il existe une de ces conditions:
ou entre 10 et 2450 ft une des conditions suivantes:
Le
GPWS

Type
d’approche nécessitant le GPWS
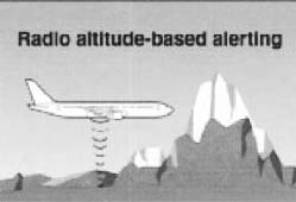
Cet équipement élabore
un certain nombre de domaines de déclenchement d'alarmes spécifiques annonçant
un risque de collision avec le sol survolé. Il travaille à partir d'une
information primaire, la hauteur radio-altimètrique, dont il déduit par différenciation
une vitesse de rapprochement du sol. Ceci a pour conséquence que le GPWS ne
"voit pas au devant de l'avion".
Il exploite également
des informations complémentaires telles que vitesse air, altitude et
vitesse verticale barométriques, et l’écart par rapport au glide slope (plan
de descente final).
D'autres
informations, provenant de capteurs témoignant de la configuration avion
(train, volets), déterminent des sous modes de fonctionnement, à l'intérieur
des domaines primaires.
L'Enhanced
GPWS (EGPWS) est un GPWS qui fournit à partir d'une base de donnée mondiale du
relief les informations suivantes supplémentaires:
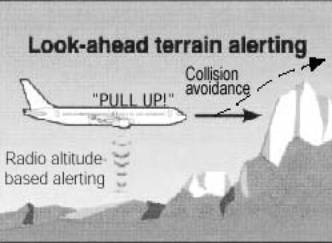
L’EGPWS

Image obtenue grâce à un GPWS plus performant
Le MSAW (Minimum Safe Altitude Warning)
En France, à la
date de l'accident, la responsabilité de l'anticollision avec le relief
n'incombait pas aux organismes de contrôle au sol. Cependant, devant la gravité
de ce problème, les services de la navigation aérienne ont recherché s'ils ne
pouvaient pas offrir aux usagers aériens une assistance préventive en cas de
danger sous la forme d'une information de vol, à titre de service radar, sans
modifier l'attribution respective des responsabilités.
De ce souci est né
le concept de MSAW (Minimum Safe Altitude Warning) développé tout d'abord par
la F.A.A. (Federal Aviation Administration des EtatsUnis) en mesure complémentaire
au GPWS. Le concept a été repris par la France où un système semblable est
en cours d'étude.
Le principe est le
suivant:
Le système de
traitement radar "en-route" connaît la position, le niveau de vol, la
vitesse horizontale et la vitesse verticale de chaque avion en contact radar et
équipé d'un transpondeur "mode CI'.
Ce système est
donc en mesure de déterminer la position d'un appareil par rapport au relief
qu'il survole ou vers lequel il se dirige à condition qu'il ait en mémoire la
topographie de ce relief. Le même processus pourrait être utilisé pour
positionner les avions par rapport aux zones à statut particulier.
En ce qui concerne
la modélisation du relief, l'Institut Géographique National dispose d'une base
de données numérisées du relief qui remplit les conditions requises. Elle est
la source à partir de laquelle le système peut construire sa base de données
géographiques internes.
Le système de
surveillance détermine à chaque renouvellement de l'information radar, le
domaine d'évolution de chaque appareil afin de vérifier, sur des critères prédéfinis
ou prévisionnels, s’il ne se mettra pas en danger à brève échéance.
L'efficacité du
système repose essentiellement sur une prédiction fiable et suffisamment
anticipée de la trajectoire de l'avion. Il faut en effet éviter de générer
des alarmes non justifiées qui décrédibiliseraient le système, tout en
adoptant des marges de sécurité suffisantes qui permettent à l'équipage de réagir
à temps.
La Direction de la
Navigation Aérienne a déjà pu vérifier en 1991 que le MSAW pouvait apporter
une aide au contrôleur dans le domaine de la surveillance des zones à statut
particulier.
Elle poursuit cette
action et fait une évaluation approfondie du logiciel afin de vérifier si une
fonction de surveillance de cette nature est utilisable dans le contexte opérationnel
actuel, notamment aux abords d'un aérodrome ou dans les évolutions à basse
hauteur.
Elle s'attache
aussi à améliorer la couverture radar, les performances du système de
traitement radar, le mode de présentation et la distribution des informations
sur les positions de contrôle.

Principe du MSAW